Robot-leg Theory
Part 1, February 21, 2024
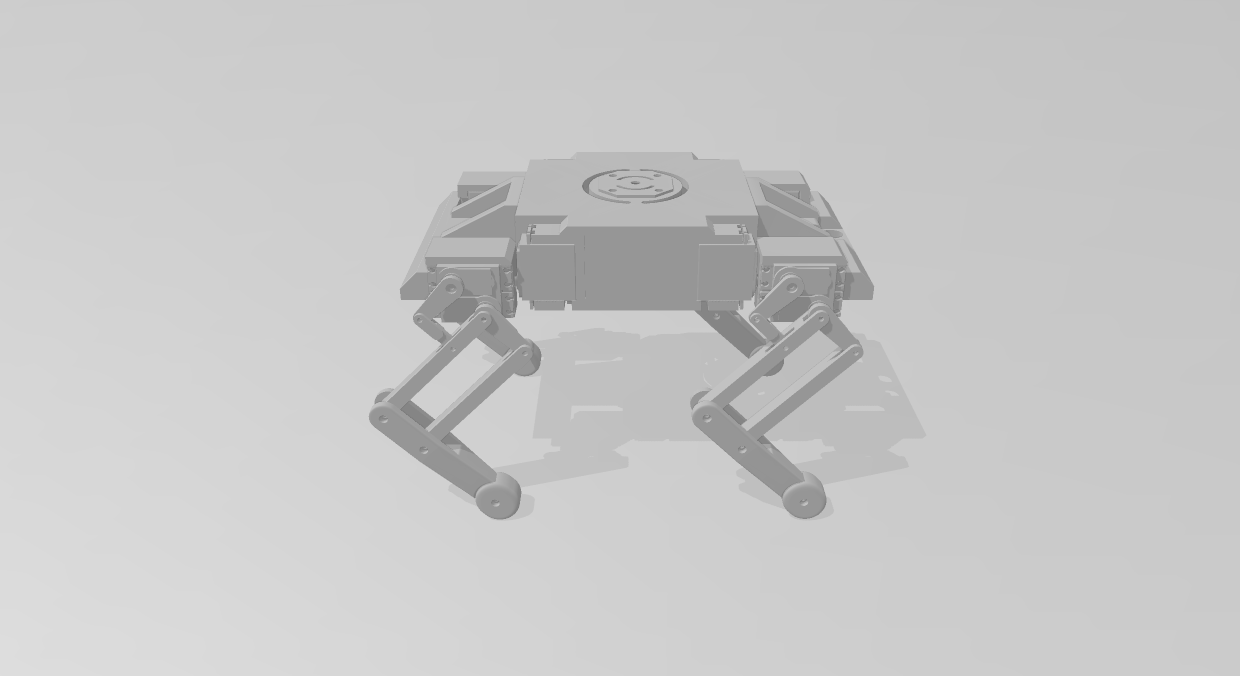
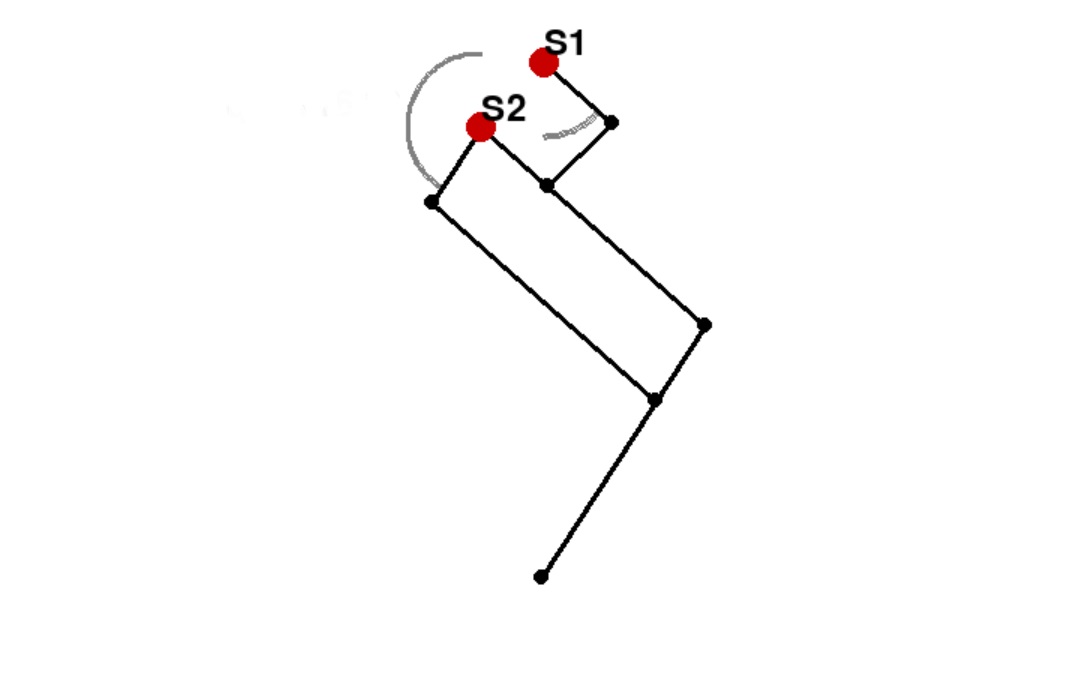
An efficient and stable leg model inspired by quadruped animals is being designed to achieve a high-speed gait and minimize power consumption. The design involves a simplified 2-joint structure and explores two primary approaches for leg motor application. Mathematical analysis and Inverse Kinematics will be used to optimize angles and manipulability measures.
A Star algorithm
Leg Simulation, June 20, 2024
Dive into the world of robot leg simulation with this detailed guide on using the A* algorithm for pathfinding in a 2D space. This post explores the essentials of creating a digital leg simulator. Learn why the A* algorithm, with its efficient pathfinding capabilities, is the perfect choice for navigating around obstacles and finding the shortest route from start to finish.