Robot-leg Theory
Part 1, February 21, 2024
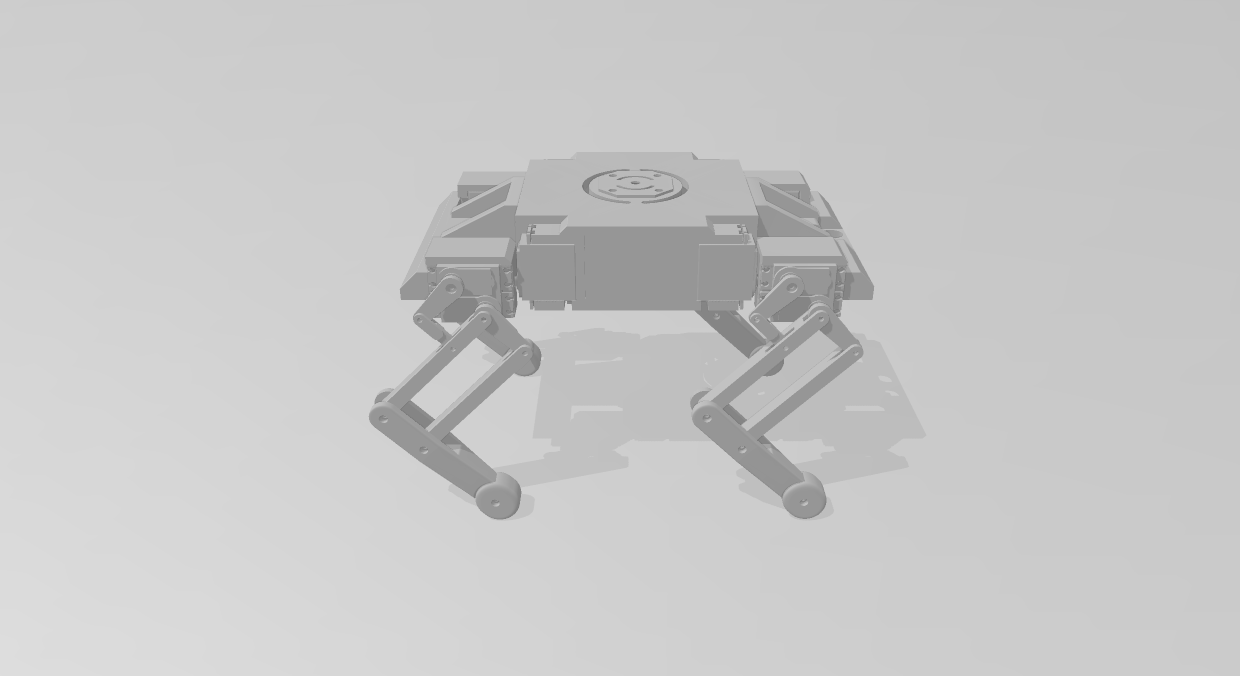
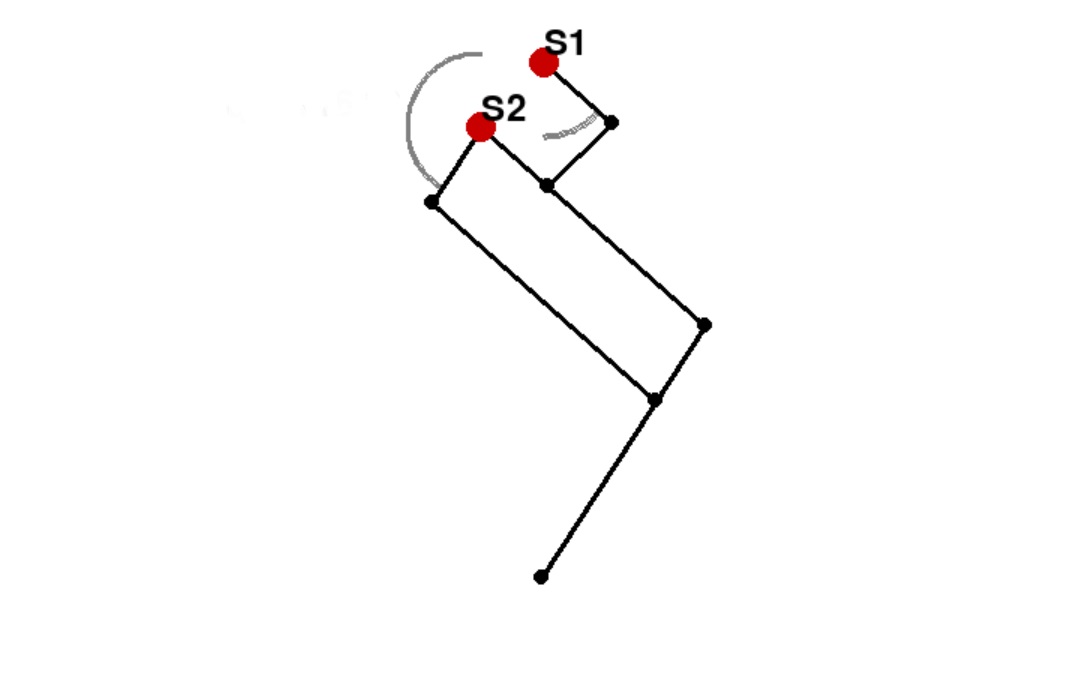
An efficient and stable leg model inspired by quadruped animals is being designed to achieve a high-speed gait and minimize power consumption. The design involves a simplified 2-joint structure and explores two primary approaches for leg motor application. Mathematical analysis and Inverse Kinematics will be used to optimize angles and manipulability measures.