Robot dog
Part 2, August 18, 2024
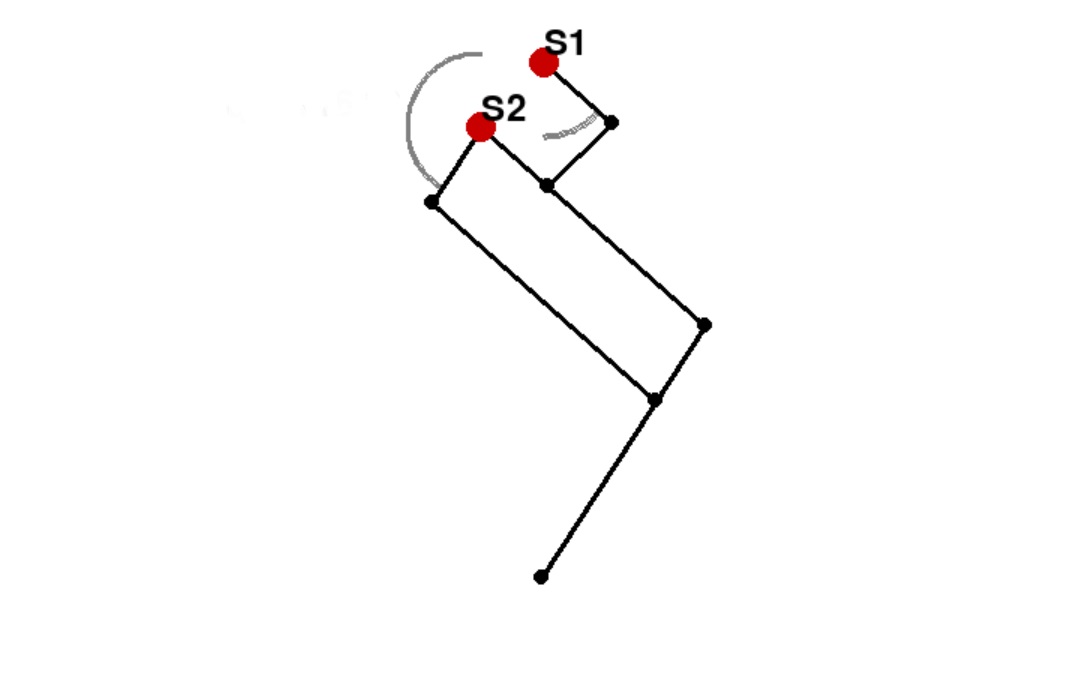
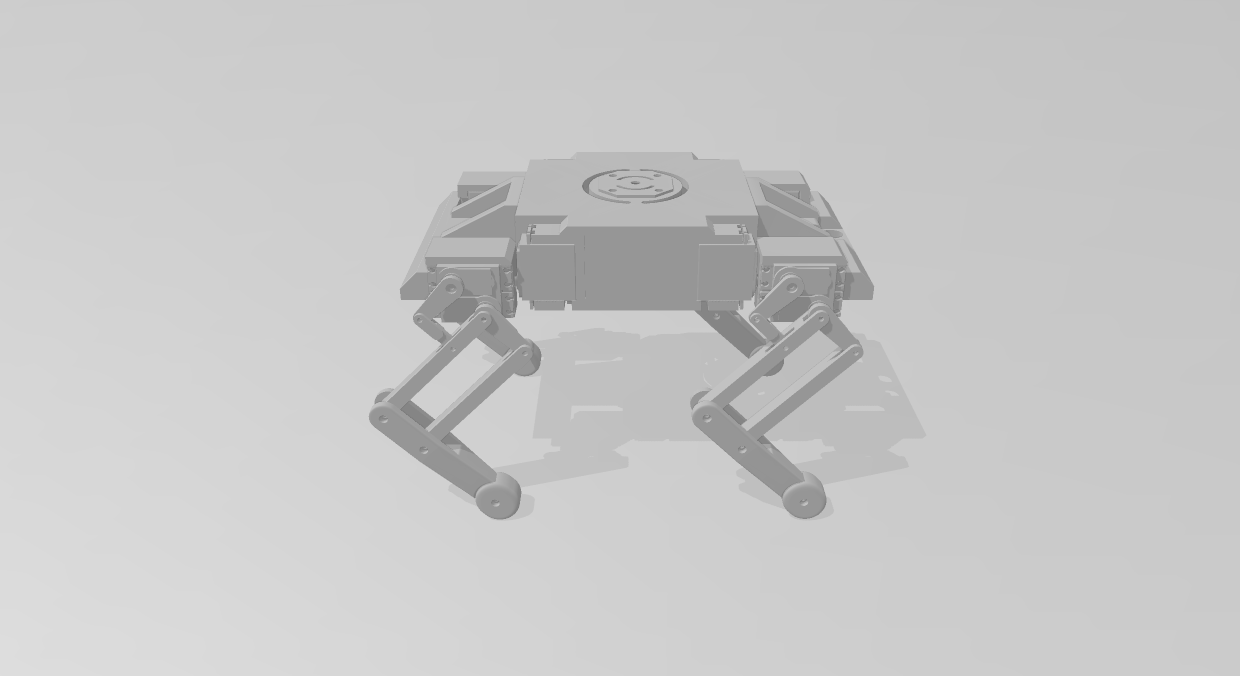
This project involves creating a functional quadruped robot dog, with a focus on smooth, realistic movement using advanced techniques like inverse kinematics and Bézier curves. Inspired by the natural walking gait of a dog, the robot’s legs move in a synchronized cycle, ensuring fluid, lifelike motion. Dive in to explore the exciting process of building and programming your own robot dog!