Tower
Face follower, June 13, 2024
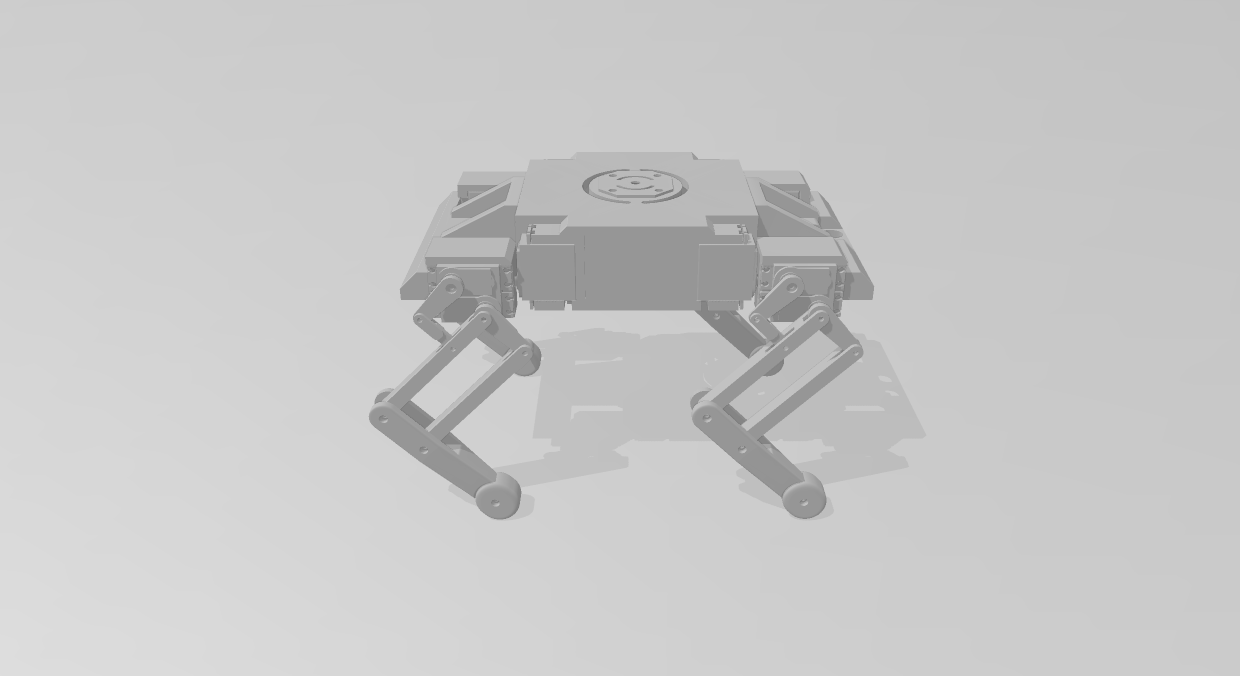
This project centers around developing a dynamic tower mechanism controlled by a Raspberry Pi and featuring an IMX519 camera for real-time face and gesture recognition. Using Python and OpenCV, the tower adjusts its position smoothly with servo motors. Future plans include integrating this technology into a robot dog, enabling gesture-based control for enhanced interaction capabilities.
Popular Posts

Tags
#Robot-Dog #Inverse Kinematics #Arduino #Freecad #3d Printing #Python #Face Recognition #Gesture Recognition #Machine Learning