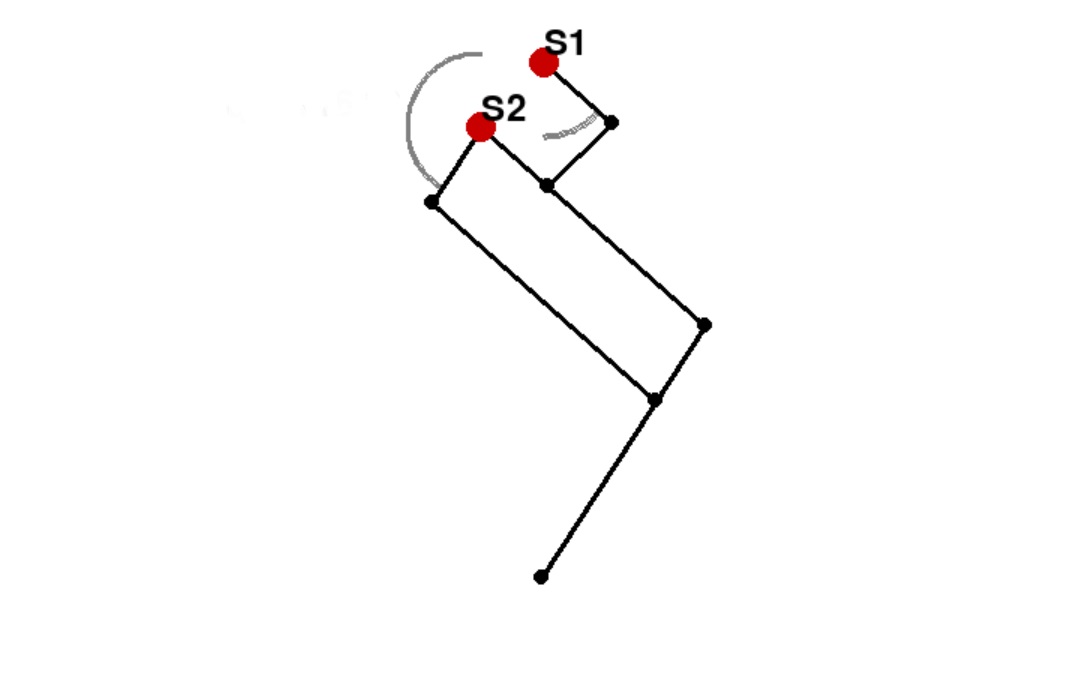
Robot-leg Theory
Part 1, February 21, 2024
An efficient and stable leg model inspired by quadruped animals is being designed to achieve a high-speed gait and minimize power consumption. The design involves a simplified 2-joint structure and explores two primary approaches for leg motor application. Mathematical analysis and Inverse Kinematics will be used to optimize angles and manipulability measures.
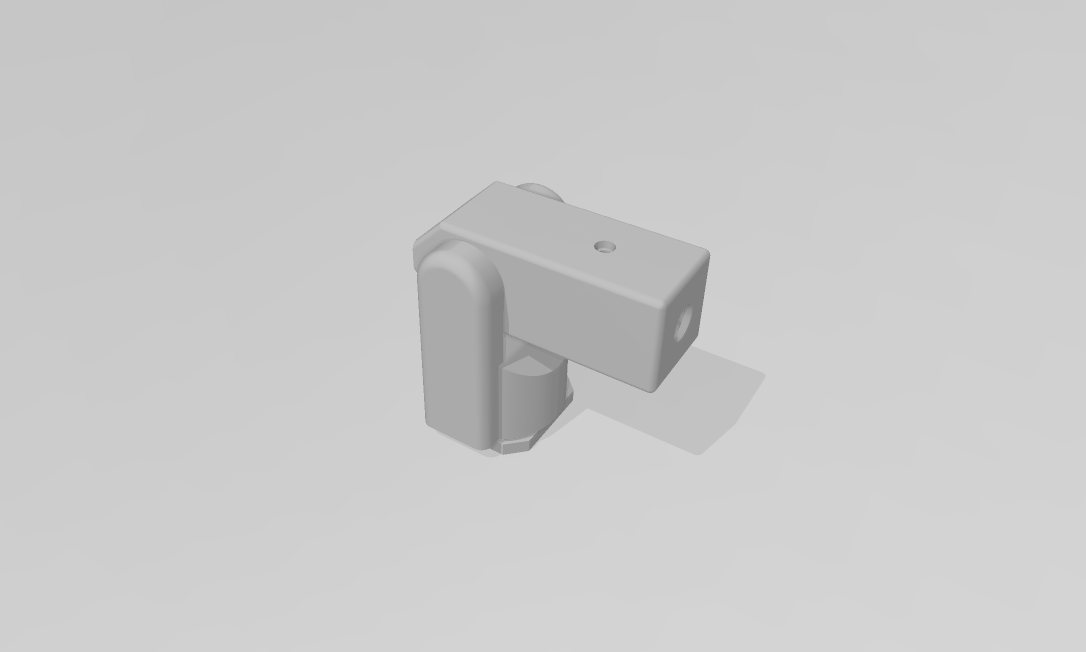
Tower
Face follower, June 13, 2024
This project centers around developing a dynamic tower mechanism controlled by a Raspberry Pi and featuring an IMX519 camera for real-time face and gesture recognition. Using Python and OpenCV, the tower adjusts its position smoothly with servo motors. Future plans include integrating this technology into a robot dog, enabling gesture-based control for enhanced interaction capabilities.
A Star algorithm
Leg Simulation, June 20, 2024
Dive into the world of robot leg simulation with this detailed guide on using the A* algorithm for pathfinding in a 2D space. This post explores the essentials of creating a digital leg simulator. Learn why the A* algorithm, with its efficient pathfinding capabilities, is the perfect choice for navigating around obstacles and finding the shortest route from start to finish.
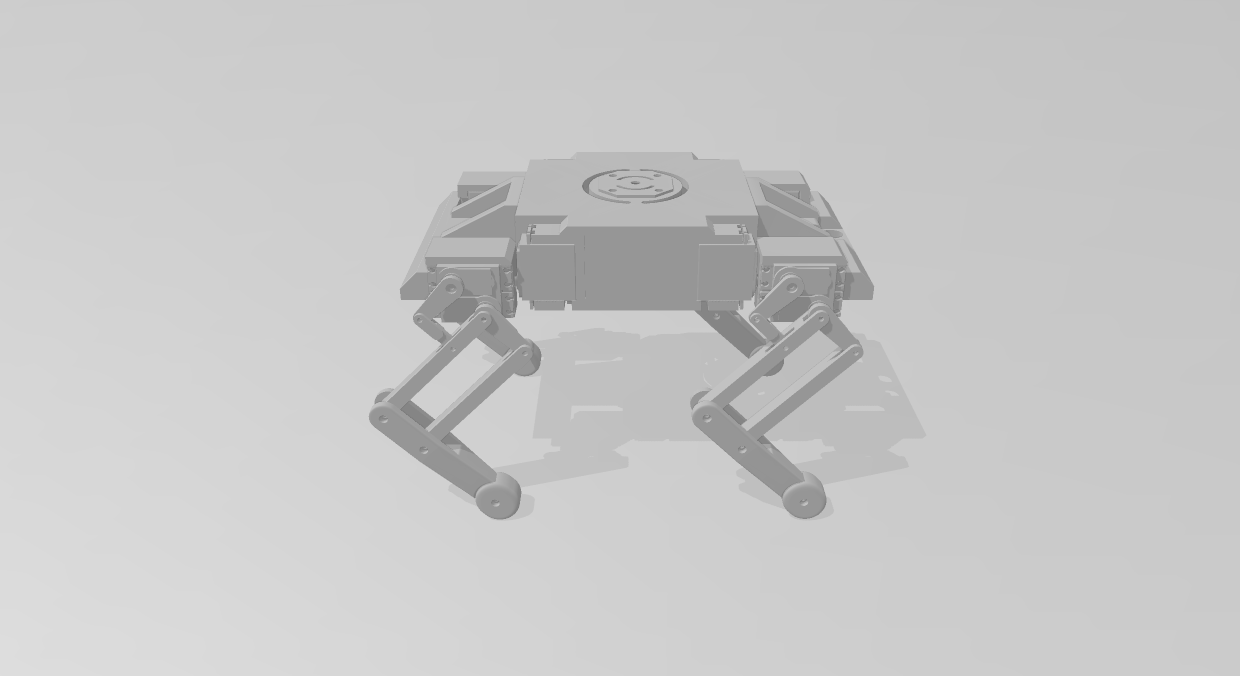
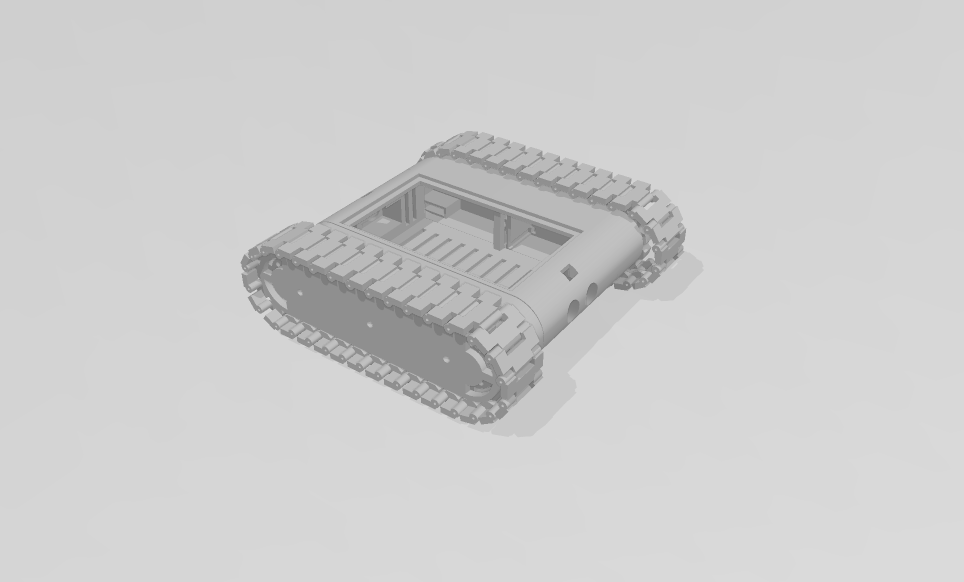
Robot dog
Part 2, August 18, 2024
This project involves creating a functional quadruped robot dog, with a focus on smooth, realistic movement using advanced techniques like inverse kinematics and Bézier curves. Inspired by the natural walking gait of a dog, the robot’s legs move in a synchronized cycle, ensuring fluid, lifelike motion. Dive in to explore the exciting process of building and programming your own robot dog!