Robot-leg Theory
Part 1, February 21, 2024
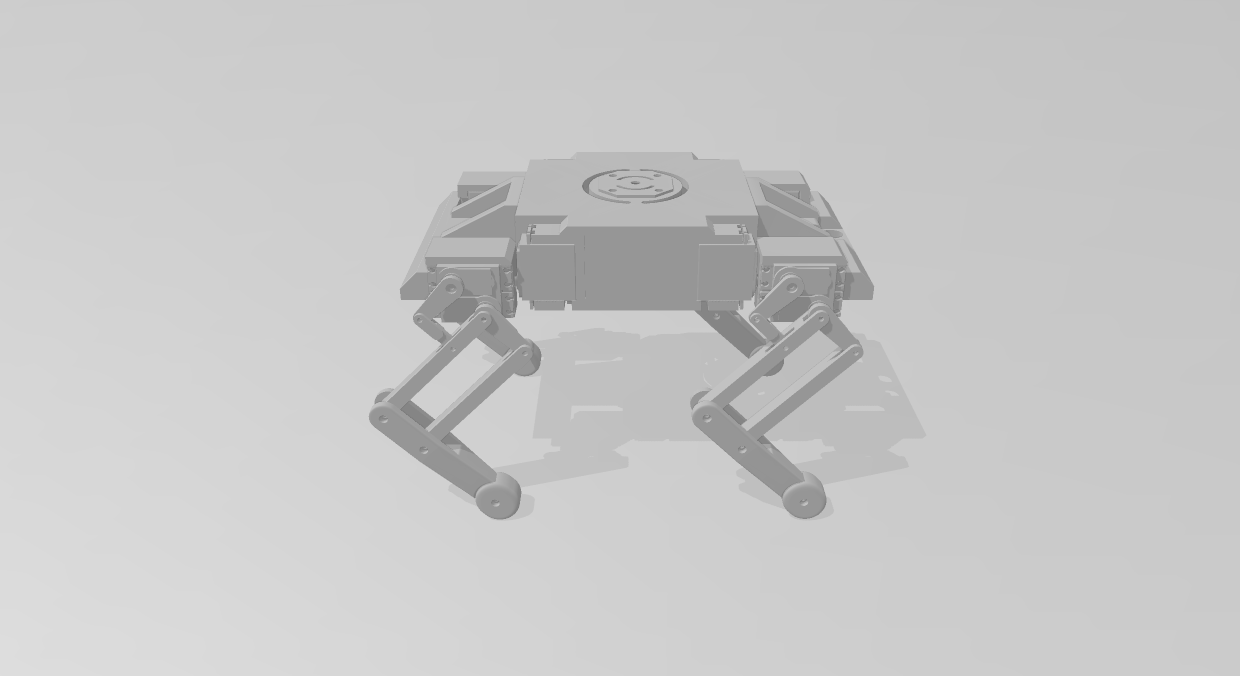
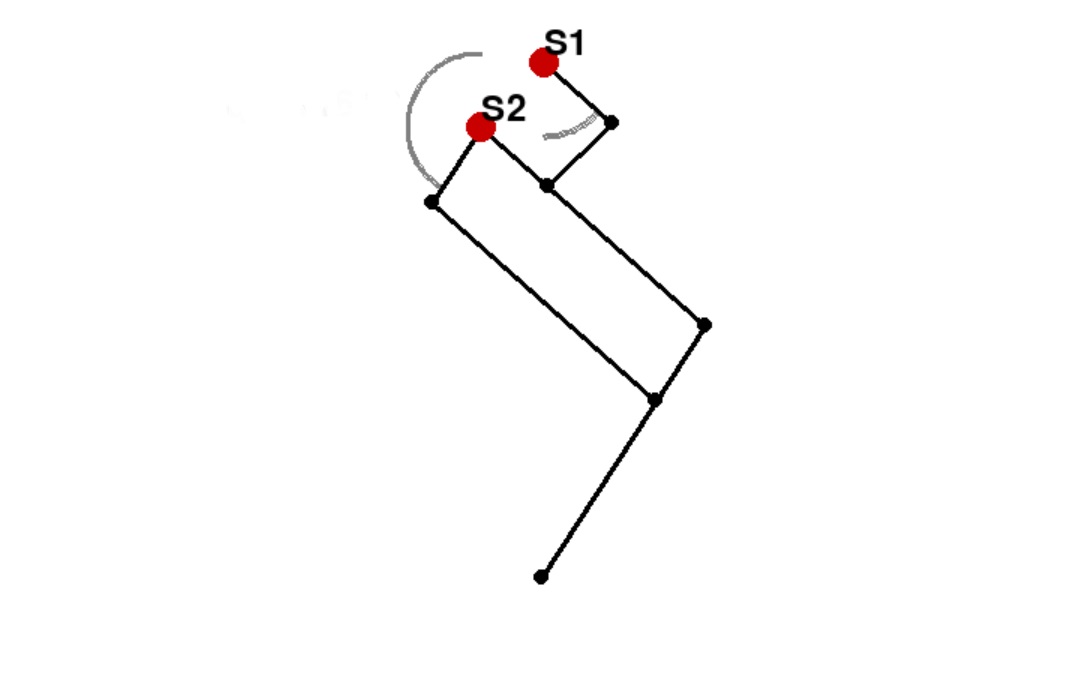
An efficient and stable leg model inspired by quadruped animals is being designed to achieve a high-speed gait and minimize power consumption. The design involves a simplified 2-joint structure and explores two primary approaches for leg motor application. Mathematical analysis and Inverse Kinematics will be used to optimize angles and manipulability measures.
Crawler
Version 1.0, February 23, 2024
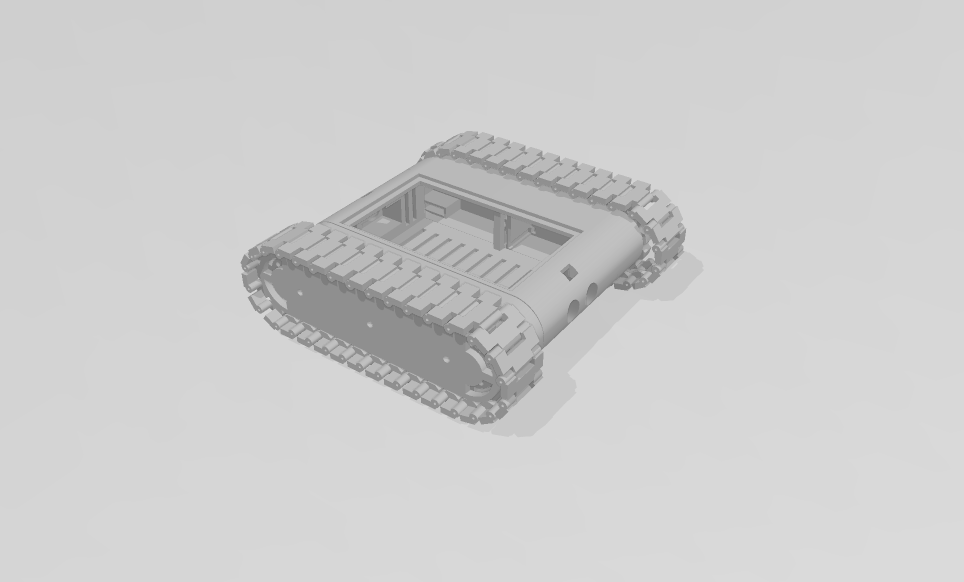
The Crawler project is a remote-controlled vehicle controlled by a homemade wireless controller. The project allows control of dual DC motors, wireless communication, and precise control with the Joystick. The construction involves assembling the 3D-printed parts, motors, and cogs. The project can be upgraded and extended in the future!