Robot dog
Part 2, August 18, 2024
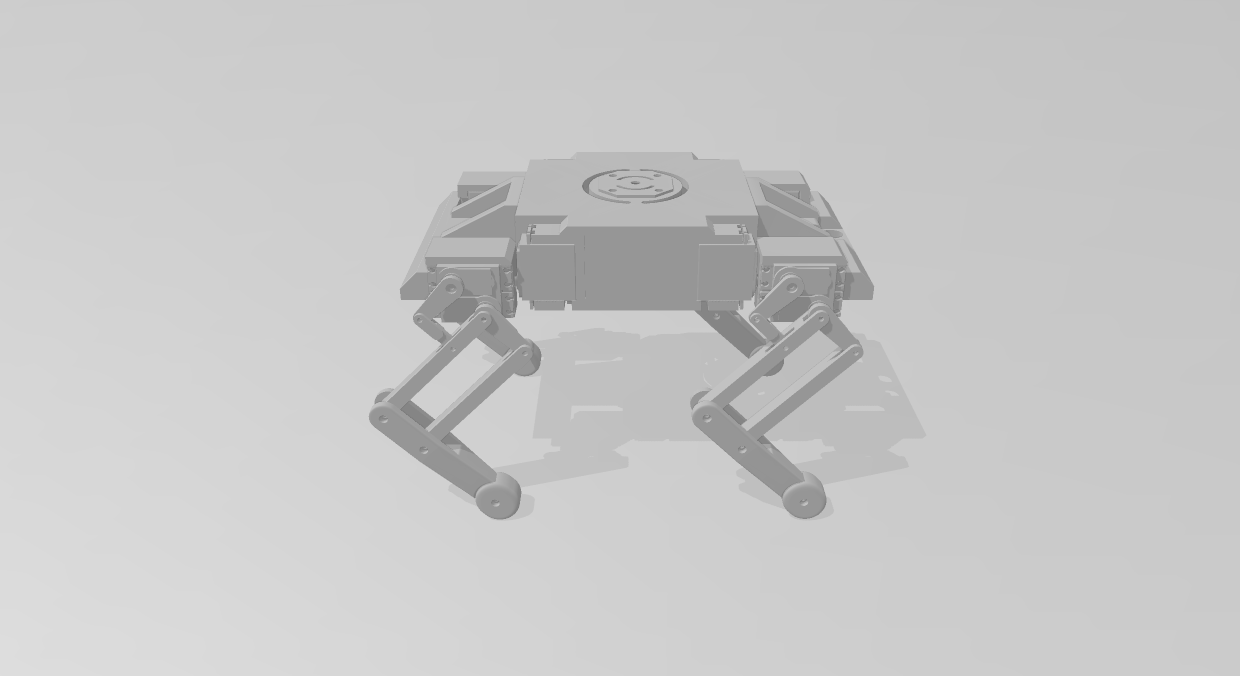
This project involves creating a functional quadruped robot dog, with a focus on smooth, realistic movement using advanced techniques like inverse kinematics and Bézier curves. Inspired by the natural walking gait of a dog, the robot’s legs move in a synchronized cycle, ensuring fluid, lifelike motion. Dive in to explore the exciting process of building and programming your own robot dog!
A Star algorithm
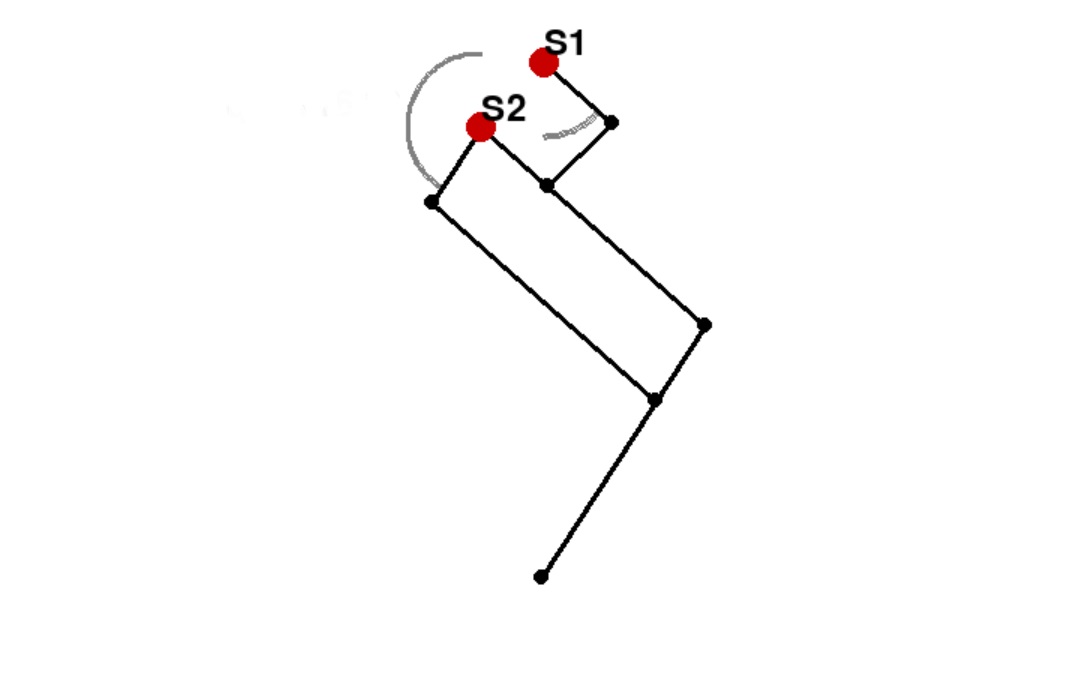
Leg Simulation, June 20, 2024
Dive into the world of robot leg simulation with this detailed guide on using the A* algorithm for pathfinding in a 2D space. This post explores the essentials of creating a digital leg simulator. Learn why the A* algorithm, with its efficient pathfinding capabilities, is the perfect choice for navigating around obstacles and finding the shortest route from start to finish.